Bayesian parameter estimation for an LG-SSM using HMC#
We show how to use the Blackjax libray to approximate the parameter posterior distribution over parameters,
where
is the marginal likelihood of the observations under an LGSSM with parameters \(\theta\).
Dynamax computes the marginal log likelihood using the Kalman filter, and jax.grad automatically computes the gradient!
Hamiltonian Monte Carlo (HMC) is an MCMC method for generating approximate samples from the posterior distribution by leveraging gradient information. (See Neal (2012) for an introduction to HMC.) The key idea is to define a Markov chain that updates the parameters by following Hamiltonian dynamics on an energy function defined by the negative log joint probability, If you set the Markov chain up carefully, you can ensure that the parameters will asymptotically follow the posterior distribution of interest.
Once you have approximate posterior samples of the parameters, \(\{\theta^{(m)}\}_{m=1}^M\), you can estimate expectations of interest under the posterior distribution. For example, we can make Bayesian forecasts by taking sample averages,
Compared this to the forecasts made in the previous notebook, where we used the maximum likelihood point estimate, \(\hat{\theta}_{\mathsf{MLE}}\). Here, we account for posterior uncertainty about the model parameters when generating our forecasts.
Thankfully, Blackjax has ready-made implementations of HMC (and other MCMC algorithms) that we can use in Dynamax, as shown below!
Setup#
%%capture
try:
import dynamax
except ModuleNotFoundError:
print('installing dynamax')
%pip install -q dynamax[notebooks]
import dynamax
try:
import blackjax
except ModuleNotFoundError:
print('installing blackjax')
%pip install -qq blackjax
import blackjax
import matplotlib.pyplot as plt
from fastprogress.fastprogress import progress_bar
from functools import partial
from jax import random as jr
from jax import numpy as jnp
from jax import jit, vmap
from itertools import count
from dynamax.linear_gaussian_ssm import LinearGaussianConjugateSSM
from dynamax.parameters import log_det_jac_constrain, to_unconstrained, from_unconstrained
from dynamax.utils.utils import random_rotation, pytree_stack, pytree_slice, ensure_array_has_batch_dim
Data#
As in the previous notebook, we simulate 2-dimensional latent states and 10-dimensional emissions from a linear Gaussian SSM with randomly initialized parameters. By default, initialize sets the dynamics matrix to \(F = 0.99 I\) so that the dynamics are a stable, slowly decaying random walk.
state_dim = 2
emission_dim = 10
num_timesteps = 100
k1, k2, k3 = jr.split(jr.PRNGKey(0), 3)
# Construct the true model with randomly initialized parameters
true_A = 0.99 * random_rotation(seed=k1, n=state_dim, theta=jnp.pi / 10)
true_Sigma = 0.01 * jnp.eye(state_dim)
true_model = LinearGaussianConjugateSSM(state_dim, emission_dim)
true_params, param_props = true_model.initialize(
key=k1, dynamics_weights=true_A, dynamics_covariance=true_Sigma)
# Sample states and emissions from the true model
true_states, emissions = true_model.sample(true_params, k3, num_timesteps)
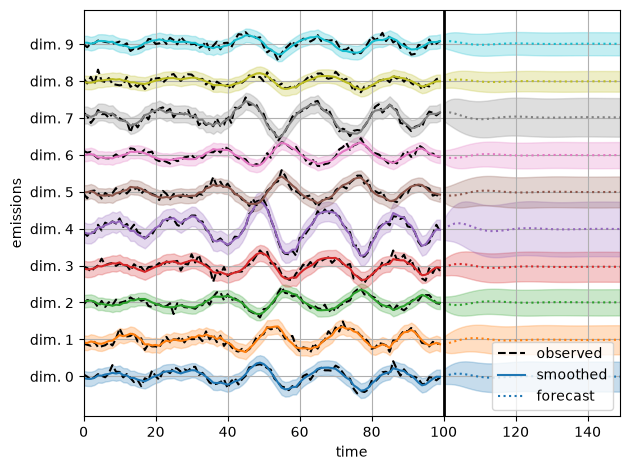
Helper function for plotting#
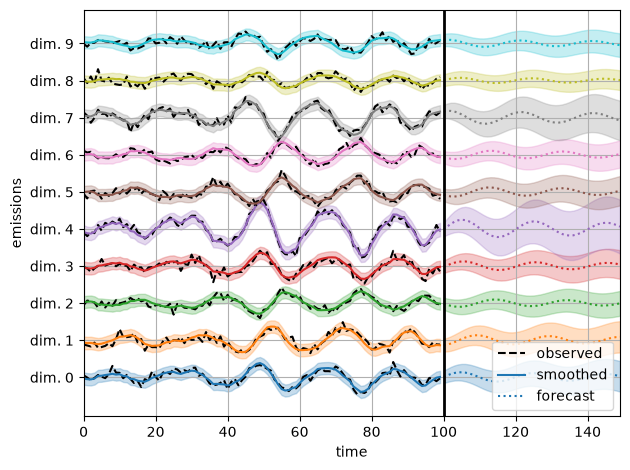
As in the LGSSM Learning notebook, this function plots the observed emissions alongside the smoothed and forecasted emissions under the model.
def plot_emissions_and_forecast(smooth_emissions,
smooth_emissions_std,
forecast_emissions,
forecast_emissions_std,
spc=4):
"""
Plot the true emissions, the reconstructed emissions, and the future forecast.
"""
num_timesteps = emissions.shape[0]
num_forecast_timesteps = forecast_emissions.shape[0]
t_obs = jnp.arange(num_timesteps)
t_forecast = jnp.arange(num_timesteps, num_timesteps + num_forecast_timesteps)
for i in range(emission_dim):
# Plot the emissions
# axs[1].axhline(i *spc, color="black", linestyle=":", alpha=0.5)
plt.plot(emissions[:, i] + spc * i, "--k", label="observed" if i == 0 else None)
ln = plt.plot(t_obs, smooth_emissions[:, i] + spc * i,
label="smoothed" if i == 0 else None)[0]
plt.fill_between(
t_obs,
spc * i + smooth_emissions[:, i] - 2 * smooth_emissions_std[:, i],
spc * i + smooth_emissions[:, i] + 2 * smooth_emissions_std[:, i],
color=ln.get_color(),
alpha=0.25,
)
# Plot the forecast
plt.plot(t_forecast, forecast_emissions[:, i] + spc * i,
ls=':', c=ln.get_color(), label="forecast" if i == 0 else None)[0]
plt.fill_between(
t_forecast,
spc * i + forecast_emissions[:, i] - 2 * forecast_emissions_std[:, i],
spc * i + forecast_emissions[:, i] + 2 * forecast_emissions_std[:, i],
color=ln.get_color(),
alpha=0.25,
)
# Draw a dividing line between observations and forecasts
plt.axvline(num_timesteps, color="black", linestyle="-", lw=2)
# Label the axes
plt.xlabel("time")
plt.xlim(0, num_timesteps + num_forecast_timesteps - 1)
plt.ylabel("emissions")
plt.yticks(spc * jnp.arange(emission_dim),
[f"dim. {i}" for i in jnp.arange(emission_dim)])
plt.legend()
plt.grid(True)
plt.tight_layout()
def smooth_and_forecast(model, params, emissions, num_forecast_timesteps=50):
smooth_emissions, smooth_emissions_std = \
model.posterior_predictive(params, emissions)
_, _, forecast_emissions, forecast_emissions_cov = \
model.forecast(params, emissions, num_forecast_timesteps)
forecast_emissions_std = jnp.sqrt(vmap(jnp.diag)(forecast_emissions_cov))
return (smooth_emissions,
smooth_emissions_std,
forecast_emissions,
forecast_emissions_std)
(true_smooth_emissions, true_smooth_emissions_std,
true_forecast_emissions, true_forecast_emissions_std) = \
smooth_and_forecast(true_model, true_params, emissions)
plot_emissions_and_forecast(true_smooth_emissions,
true_smooth_emissions_std,
true_forecast_emissions,
true_forecast_emissions_std)
Infer the model parameters using HMC#
We initialize the model with random parameters, as in the preceding notebook. Here, however, we use HMC to sample from the posterior distribution of parameters given the observed emissions.
Helper function to run HMC#
First, we write a helper function to run HMC, based on the Blackjax examples.
def fit_hmc(model,
initial_params,
props,
key,
num_samples,
emissions,
inputs=None,
warmup_steps=100,
num_integration_steps=5,
verbose=True):
"""Sample parameters of the model using HMC."""
# Make sure the emissions and inputs have batch dimensions
batch_emissions = ensure_array_has_batch_dim(emissions, model.emission_shape)
batch_inputs = ensure_array_has_batch_dim(inputs, model.inputs_shape)
initial_unc_params = to_unconstrained(initial_params, props)
# The log likelihood that the HMC samples from
def _logprob(unc_params):
params = from_unconstrained(unc_params, props)
batch_lls = vmap(partial(model.marginal_log_prob, params))(batch_emissions, batch_inputs)
lp = model.log_prior(params) + batch_lls.sum()
lp += log_det_jac_constrain(params, props)
return lp
# Initialize the HMC sampler using window_adaptation
warmup = blackjax.window_adaptation(blackjax.hmc,
_logprob,
num_integration_steps=num_integration_steps,
progress_bar=verbose)
init_key, key = jr.split(key)
(hmc_initial_state, hmc_params), _ = warmup.run(init_key, initial_unc_params, num_steps=warmup_steps)
hmc_kernel = blackjax.hmc(_logprob, **hmc_params).step
@jit
def hmc_step(hmc_state, step_key):
next_hmc_state, _ = hmc_kernel(step_key, hmc_state)
params = from_unconstrained(hmc_state.position, props)
# Compute the log joint probability using the constrained params
# Note: this is a bit inefficient because we compute the log probability twice,
# once with the constrained params and once with the unconstrained. However, the
# log prob with the constrained params is easier to compare to the true log prob.
lp = vmap(partial(model.marginal_log_prob, params))(batch_emissions, batch_inputs).sum()
lp += model.log_prior(params)
return next_hmc_state, params, lp
# Start sampling
log_probs = []
samples = []
hmc_state = hmc_initial_state
pbar = progress_bar(range(num_samples)) if verbose else range(num_samples)
for _ in pbar:
step_key, key = jr.split(key)
hmc_state, params, lp = hmc_step(hmc_state, step_key)
log_probs.append(lp)
samples.append(params)
# Combine the samples into a single pytree
return pytree_stack(samples), jnp.array(log_probs)
Call HMC#
# Plot predictions from a random, untrained model
init_key, hmc_key = jr.split(jr.PRNGKey(42))
model = LinearGaussianConjugateSSM(state_dim, emission_dim)
params, param_props = model.initialize(init_key)
sample_size = 1000
param_samples, lps = fit_hmc(model,
params,
param_props,
hmc_key,
sample_size,
emissions,
num_integration_steps=5,
warmup_steps=10)
Running window adaptation
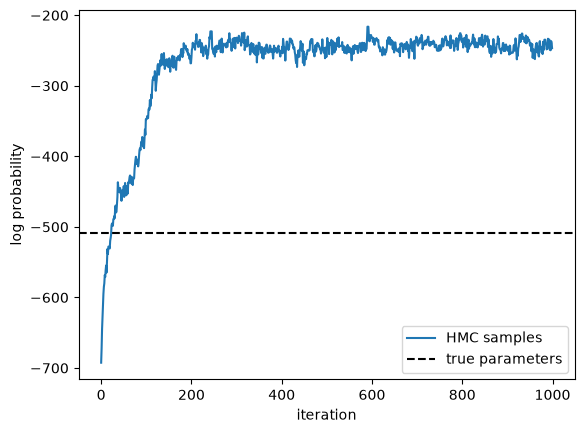
plt.plot(lps, label="HMC samples")
true_lp = true_model.marginal_log_prob(true_params, emissions) \
+ true_model.log_prior(true_params)
plt.axhline(true_lp,
color="black", linestyle="--", label="true parameters")
plt.xlabel("iteration")
plt.ylabel("log probability")
plt.legend()
<matplotlib.legend.Legend at 0x7f1580128110>
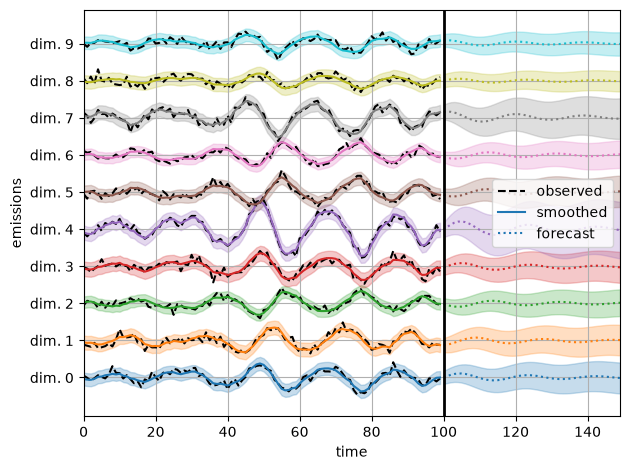
Visualize predictions with samples from the posterior#
We use the law of total variance to approximate the variance of the smoothed and forecast emissions under the posterior.
(smooth_emissions_samples, smooth_emissions_std_samples,
forecast_emissions_samples, forecast_emissions_std_samples) = \
vmap(lambda params: smooth_and_forecast(model, params, emissions))(param_samples)
# Compute the mean and standard deviation of the samples
burnin = 200
est_smooth_emissions = jnp.mean(smooth_emissions_samples[burnin:], axis=0)
est_forecast_emissions = jnp.mean(forecast_emissions_samples[burnin:], axis=0)
est_smooth_emissions_std = jnp.sqrt(
jnp.mean(smooth_emissions_std_samples[burnin:] ** 2, axis=0) +
jnp.var(smooth_emissions_samples[burnin:], axis=0))
est_forecast_emissions_std = jnp.sqrt(
jnp.mean(forecast_emissions_std_samples[burnin:] ** 2, axis=0) +
jnp.var(forecast_emissions_samples[burnin:], axis=0))
plot_emissions_and_forecast(est_smooth_emissions,
est_smooth_emissions_std,
est_forecast_emissions,
est_forecast_emissions_std)
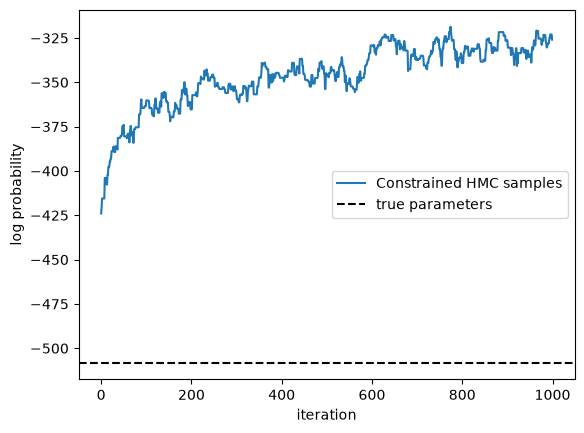
Use HMC to infer posterior over a subset of the parameters#
We freeze the transition parameters and initial parameters, so that only covariance matrices are learned. This is useful for structural time series models (see e.g., sts-jax library, which builds on dynamax.).
# Freeze transition parameters and initial parameters, so that only covariance matrices are learned
init_key, hmc_key = jr.split(jr.PRNGKey(42))
model = LinearGaussianConjugateSSM(state_dim, emission_dim)
params, param_props = model.initialize(
init_key, # emission_weights=true_params.emissions.weights,
emission_weights=true_params.emissions.weights,
emission_bias=true_params.emissions.bias
)
# Set transition parameters and initial parameters to true values and mark as frozen
param_props.emissions.weights.trainable = False
param_props.emissions.bias.trainable = False
sample_size = 1000
param_samples, lps = fit_hmc(model,
params,
param_props,
hmc_key,
sample_size,
emissions,
num_integration_steps=5,
warmup_steps=10)
Running window adaptation
plt.plot(lps, label="Constrained HMC samples")
true_lp = true_model.marginal_log_prob(true_params, emissions) \
+ true_model.log_prior(true_params)
plt.axhline(true_lp,
color="black", linestyle="--", label="true parameters")
plt.xlabel("iteration")
plt.ylabel("log probability")
plt.legend()
<matplotlib.legend.Legend at 0x7f1580098dd0>
(smooth_emissions_samples, smooth_emissions_std_samples,
forecast_emissions_samples, forecast_emissions_std_samples) = \
vmap(lambda params: smooth_and_forecast(model, params, emissions))(param_samples)
# Compute the mean and standard deviation of the samples
burnin = 200
est_smooth_emissions = jnp.mean(smooth_emissions_samples[burnin:], axis=0)
est_forecast_emissions = jnp.mean(forecast_emissions_samples[burnin:], axis=0)
est_smooth_emissions_std = jnp.sqrt(
jnp.mean(smooth_emissions_std_samples[burnin:] ** 2, axis=0) +
jnp.var(smooth_emissions_samples[burnin:], axis=0))
est_forecast_emissions_std = jnp.sqrt(
jnp.mean(forecast_emissions_std_samples[burnin:] ** 2, axis=0) +
jnp.var(forecast_emissions_samples[burnin:], axis=0))
plot_emissions_and_forecast(est_smooth_emissions,
est_smooth_emissions_std,
est_forecast_emissions,
est_forecast_emissions_std)
Conclusion#
With Dynamax, it’s fairly straightforward to run black-box MCMC routines like HMC to approximate the posterior distribution over model parameters. You just plug in the marginal log probability, since the filtering algorithms are differentiable in Dynamax!