States estimation (inference)
Contents
{
"tags": [
"hide-cell"
]
}
### Import standard libraries
import abc
from dataclasses import dataclass
import functools
import itertools
from typing import Any, Callable, NamedTuple, Optional, Union, Tuple
import matplotlib.pyplot as plt
import numpy as np
import jax
import jax.numpy as jnp
from jax import lax, vmap, jit, grad
from jax.scipy.special import logit
from jax.nn import softmax
from functools import partial
from jax.random import PRNGKey, split
import jsl
import ssm_jax
States estimation (inference)¶
Given the sequence of observations, and a known model, one of the main tasks with SSMs to perform posterior inference, about the hidden states; this is also called state estimation. At each time step \(t\), there are multiple forms of posterior we may be interested in computing, including the following:
the filtering distribution \(p(\hidden_t|\obs_{1:t})\)
the smoothing distribution \(p(\hidden_t|\obs_{1:T})\) (note that this conditions on future data \(T>t\))
the fixed-lag smoothing distribution \(p(\hidden_{t-\ell}|\obs_{1:t})\) (note that this infers \(\ell\) steps in the past given data up to the present).
We may also want to compute the predictive distribution \(h\) steps into the future:
where the hidden state predictive distribution is
See Fig. 5 for a summary of these distributions.
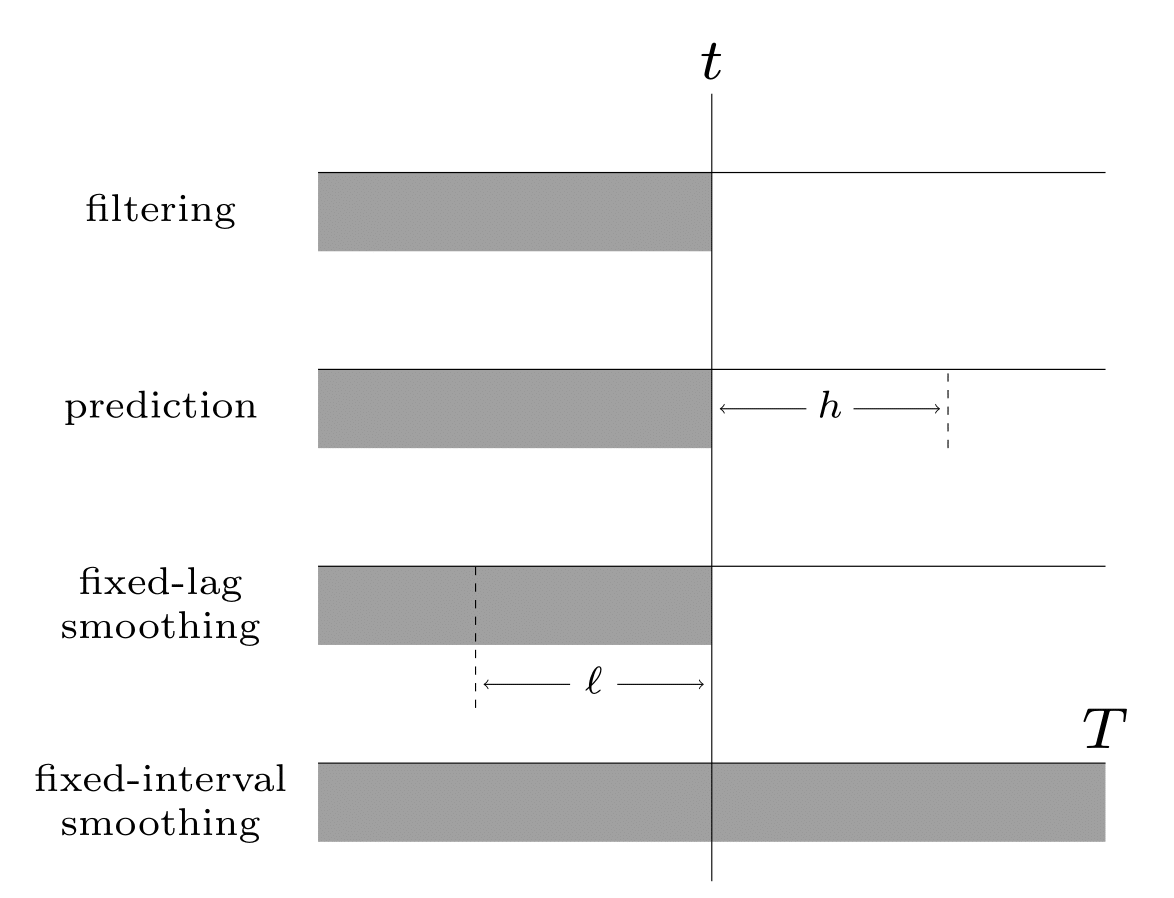
Fig. 5 Illustration of the different kinds of inference in an SSM. The main kinds of inference for state-space models. The shaded region is the interval for which we have data. The arrow represents the time step at which we want to perform inference. \(t\) is the current time, \(T\) is the sequence length, \(\ell\) is the lag and \(h\) is the prediction horizon.¶
In addition to comuting posterior marginals, we may want to compute the most probable hidden sequence, i.e., the joint MAP estimate
or sample sequences from the posterior
Algorithms for all these task are discussed in the following chapters, since the details depend on the form of the SSM.
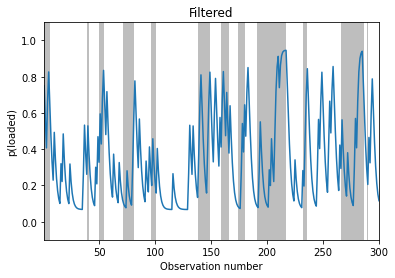
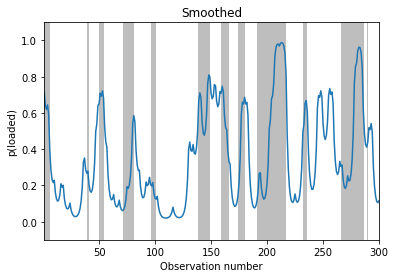
Example: inference in the casino HMM¶
We now illustrate filtering, smoothing and MAP decoding applied to the casino HMM from sec:casino and .
# state transition matrix
A = np.array([
[0.95, 0.05],
[0.10, 0.90]
])
# observation matrix
B = np.array([
[1/6, 1/6, 1/6, 1/6, 1/6, 1/6], # fair die
[1/10, 1/10, 1/10, 1/10, 1/10, 5/10] # loaded die
])
pi = np.array([0.5, 0.5])
(nstates, nobs) = np.shape(B)
import distrax
from distrax import HMM
hmm = HMM(trans_dist=distrax.Categorical(probs=A),
init_dist=distrax.Categorical(probs=pi),
obs_dist=distrax.Categorical(probs=B))
seed = 314
n_samples = 300
z_hist, x_hist = hmm.sample(seed=PRNGKey(seed), seq_len=n_samples)
WARNING:absl:No GPU/TPU found, falling back to CPU. (Set TF_CPP_MIN_LOG_LEVEL=0 and rerun for more info.)
# Call inference engine
filtered_dist, _, smoothed_dist, loglik = hmm.forward_backward(x_hist)
map_path = hmm.viterbi(x_hist)
/opt/anaconda3/lib/python3.8/site-packages/jax/_src/numpy/lax_numpy.py:4457: UserWarning: Explicitly requested dtype <class 'jax.numpy.int64'> requested in astype is not available, and will be truncated to dtype int32. To enable more dtypes, set the jax_enable_x64 configuration option or the JAX_ENABLE_X64 shell environment variable. See https://github.com/google/jax#current-gotchas for more.
lax_internal._check_user_dtype_supported(dtype, "astype")
# Find the span of timesteps that the simulated systems turns to be in state 1
def find_dishonest_intervals(z_hist):
spans = []
x_init = 0
for t, _ in enumerate(z_hist[:-1]):
if z_hist[t + 1] == 0 and z_hist[t] == 1:
x_end = t
spans.append((x_init, x_end))
elif z_hist[t + 1] == 1 and z_hist[t] == 0:
x_init = t + 1
return spans
# Plot posterior
def plot_inference(inference_values, z_hist, ax, state=1, map_estimate=False):
n_samples = len(inference_values)
xspan = np.arange(1, n_samples + 1)
spans = find_dishonest_intervals(z_hist)
if map_estimate:
ax.step(xspan, inference_values, where="post")
else:
ax.plot(xspan, inference_values[:, state])
for span in spans:
ax.axvspan(*span, alpha=0.5, facecolor="tab:gray", edgecolor="none")
ax.set_xlim(1, n_samples)
# ax.set_ylim(0, 1)
ax.set_ylim(-0.1, 1.1)
ax.set_xlabel("Observation number")
# Filtering
fig, ax = plt.subplots()
plot_inference(filtered_dist, z_hist, ax)
ax.set_ylabel("p(loaded)")
ax.set_title("Filtered")
Text(0.5, 1.0, 'Filtered')
# Smoothing
fig, ax = plt.subplots()
plot_inference(smoothed_dist, z_hist, ax)
ax.set_ylabel("p(loaded)")
ax.set_title("Smoothed")
Text(0.5, 1.0, 'Smoothed')
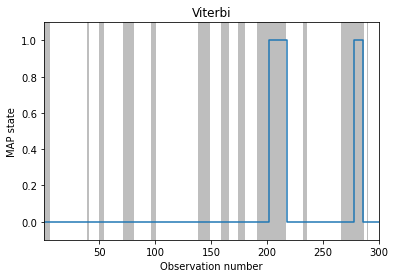
# MAP estimation
fig, ax = plt.subplots()
plot_inference(map_path, z_hist, ax, map_estimate=True)
ax.set_ylabel("MAP state")
ax.set_title("Viterbi")
Text(0.5, 1.0, 'Viterbi')
# TODO: posterior samples
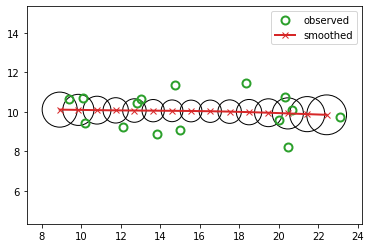
Example: inference in the tracking LG-SSM¶
We now illustrate filtering, smoothing and MAP decoding applied to the 2d tracking HMM from Example: tracking a 2d point.
key = jax.random.PRNGKey(314)
timesteps = 15
delta = 1.0
A = jnp.array([
[1, 0, delta, 0],
[0, 1, 0, delta],
[0, 0, 1, 0],
[0, 0, 0, 1]
])
C = jnp.array([
[1, 0, 0, 0],
[0, 1, 0, 0]
])
state_size, _ = A.shape
observation_size, _ = C.shape
Q = jnp.eye(state_size) * 0.001
R = jnp.eye(observation_size) * 1.0
mu0 = jnp.array([8, 10, 1, 0]).astype(float)
Sigma0 = jnp.eye(state_size) * 1.0
from jsl.lds.kalman_filter import LDS, smooth, filter
lds = LDS(A, C, Q, R, mu0, Sigma0)
z_hist, x_hist = lds.sample(key, timesteps)
from jsl.demos.plot_utils import plot_ellipse
def plot_tracking_values(observed, filtered, cov_hist, signal_label, ax):
timesteps, _ = observed.shape
ax.plot(observed[:, 0], observed[:, 1], marker="o", linewidth=0,
markerfacecolor="none", markeredgewidth=2, markersize=8, label="observed", c="tab:green")
ax.plot(*filtered[:, :2].T, label=signal_label, c="tab:red", marker="x", linewidth=2)
for t in range(0, timesteps, 1):
covn = cov_hist[t][:2, :2]
plot_ellipse(covn, filtered[t, :2], ax, n_std=2.0, plot_center=False)
ax.axis("equal")
ax.legend()
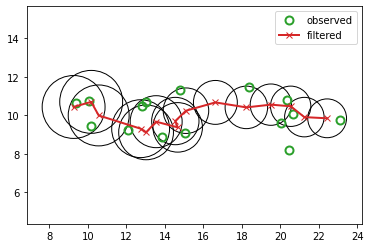
# Filtering
mu_hist, Sigma_hist, mu_cond_hist, Sigma_cond_hist = filter(lds, x_hist)
l2_filter = jnp.linalg.norm(z_hist[:, :2] - mu_hist[:, :2], 2)
print(f"L2-filter: {l2_filter:0.4f}")
fig_filtered, axs = plt.subplots()
plot_tracking_values(x_hist, mu_hist, Sigma_hist, "filtered", axs)
L2-filter: 3.2481
# Smoothing
mu_hist_smooth, Sigma_hist_smooth = smooth(lds, mu_hist, Sigma_hist, mu_cond_hist, Sigma_cond_hist)
l2_smooth = jnp.linalg.norm(z_hist[:, :2] - mu_hist_smooth[:, :2], 2)
print(f"L2-smooth: {l2_smooth:0.4f}")
fig_smoothed, axs = plt.subplots()
plot_tracking_values(x_hist, mu_hist_smooth, Sigma_hist_smooth, "smoothed", axs)
L2-smooth: 2.0450